Table of contents
Digital filter
Two digital filters are needed in order to detect if a signal has been received, and whether this signal is a high or low bit. Both of those filters are bandpass filters, centered around 900 Hz and 1100 Hz.
Design of the filter
The specifications require a filter such that :
- Useful frequencies are within +/-1.5% of the center frequency
- Frequencies above +/-3.5% of the center frequency should be cut off
- Maximum attenuation of useful frequencies: H1 = 0.9
- Minimum attenuation of cut-off frequencies: H2 = 0.1
A sampling frequency of 15 kHz was chosen for the theoretical design of the analog filter. The filter coefficients were determined with the provided python script. This script uses the signal module of the scipy library to design the filter. It starts by determining the order of the filter required (here a 4th order). The butter function is then called, which generates a numerical filter by default.
For the filter centered around 1100 Hz :
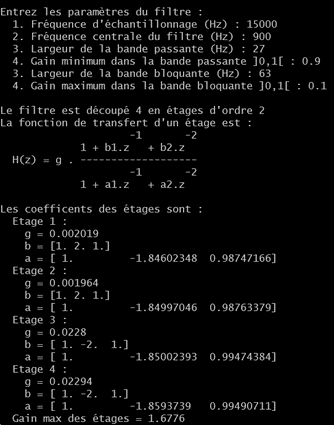
Which corresponds to this transfer function :
Base principle
It is possible to turn any analog filter to a digital one, using the Tustin approximation : \(p = \frac{2}{T_s} \times \frac{z-1}{z+1}\). A recurring equation is then deducted from the transfer function, which was determined in the previous part. In terms of maths :
\(\begin{align} & Y(z) = \frac{\sum a_k \times z^{-k}}{\sum b_k \times z^{-k}} \times X(z) \\ & \Leftrightarrow \sum a_k \times z^{-k} Y(z) = \sum b_k \times z^{-k} X(z) \\ & \Leftrightarrow \sum a_k y(n-k) = \sum b_k \times x(n-k) \\ & \Leftrightarrow y(n) = \frac{1}{a_0} \times \left [ \sum b_k \times x(n-k) - \sum_{k \neq 0} a_k y(n-k) \right ] \end{align}\)
Numerical simulation
Before optimizing
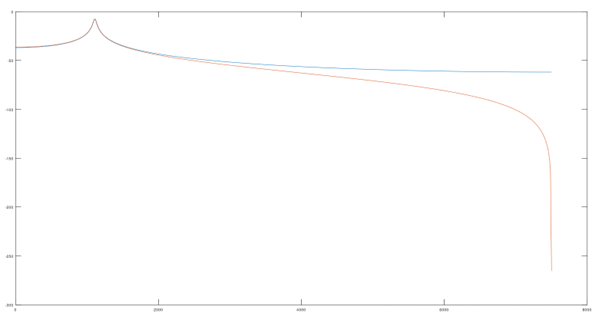
The filter around 1100 Hz was first simulated on MATLAB in order to take advantage of the graphical tools and the workspace system to debug the code. The first stage was first implemented separately (in blue, the theoretical filter and in orange, the numerically simulated stage) :
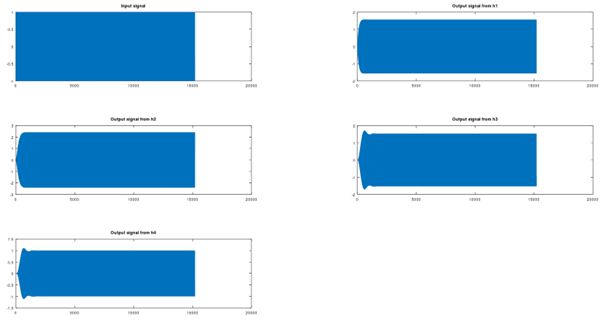
The method of simulation is to simply generate Q sines at the input, with frequencies equidistant between \(]0, fs/2[\). The output of the system is then observed in regime to determine the gain. It was then necessary to determine whether the 4 stages of the filter were in parallel (sum of the responses of each filter), or in series (the output of one stage becomes the input of another). By simulation, it was determined that the filters were in series.
Here is a simulation of the 4 stages of the filter centered around 1100 Hz for an input frequency of a sin of 1100 Hz :
And for an input frequency of 1150 Hz :
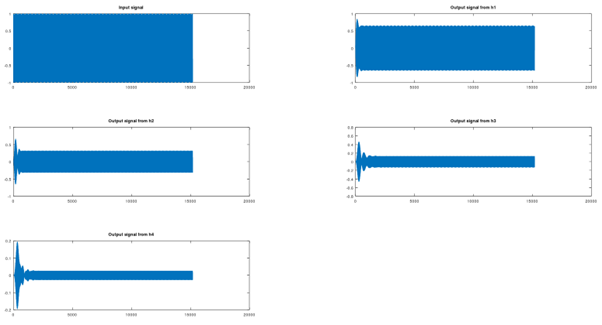
This was done to check if the filter attenuates correctly the frequencies.
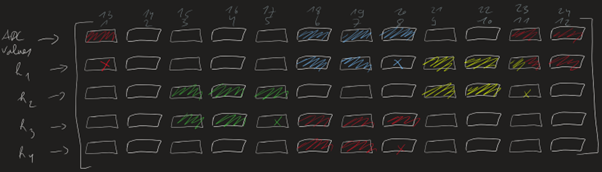
Optimizing memory
As there are 4 stages + the output, and the stages are in series, a 5x12 table was used to optimize memory :
Optimizing computational ressources
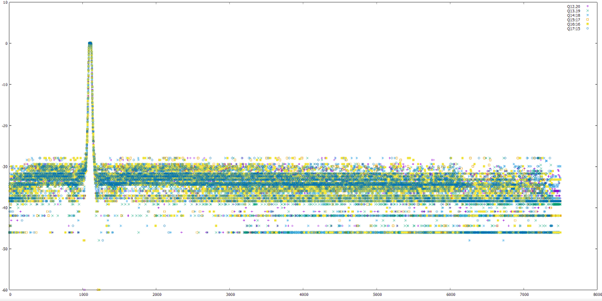
As floats aren’t native to the microprocessor architecture, fixed point compute was used. The data type that will be used are therefore integers, stored on 32 bits. To determine how many bits to use for the integer and the fractional part, numerical simulation in C of the filters was used. The notation used is QX:Y, X being the number of bits used for the integer part, and Y for the fractional part (\(X + Y = 32\)).
Between Q12:20 and Q17:15, for all values :
For the most important values :
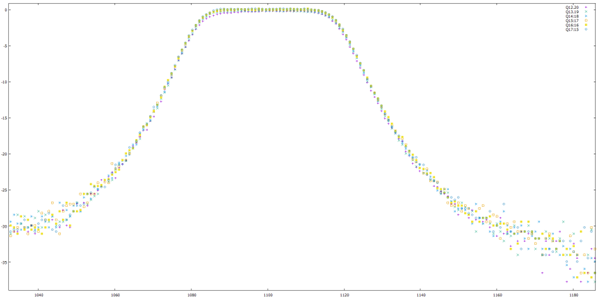
For Q18:14, the maximal values of int32_t was reached, which causes overflow :
Q17:15 was chosen, but any repartition that doesn’t ovoerflow would have been fine, as the performance doesn’t seem too much affected.
Implementation on the microcontroller
The code is available in filter.c.
The chip is overclocked to 39.5 MHz, to allow sufficiently fast sampling. The code starts by resetting the values in the array to 0 :
void reset_tables()
{
for (int i = 0; i < 5; i++) {
for (int j = 0; j < 12; j++) {
ys_1[i][j] = 0;
ys_2[i][j] = 0;
}
}
for (int i = 0; i < 17; i++) {
last_values_1[i] = 0;
last_values_2[i] = 0;
}
}
An infinite loop waits for the conversion of the adc (15 kHz), then calculates the output of the stages. The pointers to the array are updated :
while(1)
{
if (adcConversionDone())
{
voltage = adcRead();
if (voltage >= 4096 || voltage < 0)
{
continue; // waits for the next sample
}
ys_1[0][pointer_current] = voltage; // updates current value
ys_2[0][pointer_current] = voltage;
for (int k = 0; k < FLOORS; k++) // filter id
{ // recursive equation for all of the stages in series
ys_1[k + 1][pointer_current] = ((gs_1[k] * ((bs_1[k][0] * ys_1[k][pointer_current] + bs_1[k][1] * ys_1[k][pointer_before] + bs_1[k][2] * ys_1[k][pointer_last]) >> M_FILTER)) - as_1[k][1] * ys_1[k + 1][pointer_before] - as_1[k][2] * ys_1[k + 1][pointer_last]) >> (M_FILTER);
ys_2[k + 1][pointer_current] = ((gs_2[k] * ((bs_2[k][0] * ys_2[k][pointer_current] + bs_2[k][1] * ys_2[k][pointer_before] + bs_2[k][2] * ys_2[k][pointer_last]) >> M_FILTER)) - as_2[k][1] * ys_2[k + 1][pointer_before] - as_2[k][2] * ys_2[k + 1][pointer_last]) >> (M_FILTER);
}
last_values_1[pointer_last_values] = ys_1[4][pointer_current];
last_values_2[pointer_last_values] = ys_2[4][pointer_current];
// updating pointers
pointer_last = (pointer_last + 1) % 12; pointer_before = (pointer_before + 1) % 12; pointer_current = (pointer_current + 1) % 12;
pointer_last_values = (pointer_last_values + 1) % 18;
}
}
In parallel, at 1000 Hz, an interrupt timer, called analysing timer is used to analyse the array values. While this code is running, sampling does not take place. The maximum value of the ouput of the filters is obtained from the previous 18 samples (which ensures that at least one period of the signal is contained in the samples). If one of the two values exceeds an experimentally determined threshold (around 300), one of the filters has detected a signal.
When a signal is detected, the chip goes into listening mode. Each time the analysing timer is trigered, the average_sample variable will be incremented if the 1100 Hz filter has detected a signal, and decremented if it is the 900 Hz filter. Once 99 samples have been received (theoretically 100 but the frequency is not exactly 1000 Hz), a bit has been received. This bit is deducted from the value of average_sample, and is sent to the Frame State Machine. If this bit is the last one of the frame, everything is reset.
Ways around the transient of the digital filter
Due to a delay in the detection of the signal at the first bit, caused by the digital filter transient, the first bit is detected after 74 samples and not 99.
Also, as can be seen in the figure above, again due to the filter transient, some short sounds (composed of many frequencies, such as a clap) are not attenuated fast enough. During sampling, the filters then detect a signal. In order to overcome this problem, a “fluke” detection system has been implemented. A noise_counter variable counts the number of times that none of the filters detected a signal during the first bit. If this variable reaches 15/74, it is probably a fluke and the system resets.
Full code of the analysing timer :
void __attribute__((interrupt, no_auto_psv))_T1Interrupt(void)
{
// ISR code does the same things that the main loop did in polling
_T1IF = 0; // down the interrupt flag
max_1 = 0;
max_2 = 0;
for (int ii = 0; ii < 18; ii++)
{
if (max_1 < last_values_1[ii]) max_1 = last_values_1[ii];
if (max_2 < last_values_2[ii]) max_2 = last_values_2[ii];
}
filter_0 = (max_1 > THRESHOLD) ? 1 : 0;
filter_1 = (max_2 > THRESHOLD) ? 1 : 0;
if (filter_0 == 1 || filter_1 == 1)
{
if (sample_count == 0)
{
bit_count = 0;
average_sample = 0;
is_listening = 1;
noise_counter = 0;
_LATB12 = 1; _LATB4 = 0; // LEDs
}
average_sample += filter_1;
average_sample -= filter_0;
}
if (is_listening && bit_count == 0 && sample_count < 75 && filter_0 == 0 && filter_1 == 0)
{
noise_counter ++;
if (noise_counter > 15)
{
// probably fluke
sample_count = 0;
bit_count = 0;
average_sample = 0;
is_listening = 0; _LATB12 = 0;
_LATB4 = 1; // LEDs
reset_tables();
resetFSM();
noise_counter = 0;
}
}
if (sample_count == 99 || (bit_count == 0 && sample_count == 74))
{
bit_count ++;
sample_count = 0;
// bit has been received
_LATB14 = (average_sample > 0); // LED
_LATB5 = (average_sample < 0); // LED
// sends to FSM:
FrameFSM(average_sample > 0);
reset_tables();
average_sample = 0;
}
if (bit_count == FRAME_LENGTH) //defined in parameters.h
{
sample_count = 0;
bit_count = 0;
average_sample = 0;
is_listening = 0; _LATB12 = 0; _LATB14 = 0; _LATB5 = 0;
reset_tables();
resetFSM();
T1CONbits.TON = 1;
}
if (is_listening)
{
sample_count ++;
}
}